Quickstart#
Nous présentons ici un exemple simple du pipeline footprint2graph.
Cet exemple repose sur une collection de traces simulées à partir d’un réseau. Le réseau est un extrait de la BDTOPO situé sur un versant de montagne en face de la ville de Chamonix, il représente un cas non complexe de tronçons. Ce réseau est encodé dans un fichier CSV, téléchargeable ici : Télécharger le jeu de données
Ce pipeline est exécuté en une seule itération. On ne l’exécute q’une seule fois, car comme vous le verrez, tous les points d’obervations des traces GNSS sont utilisés dans le pipeline afin de contruire les géométries des arcs du graphe.
Import des librairies#
Les deux librairies socles : tracklib et footprint2graph
Pour visualiser les résultats : matplotlib
[1]:
import os
import sys
import matplotlib.pyplot as plt
# Ajout dans la variable PATH du système du chemin où est installée la librairie tracklib
module_path = os.path.abspath(os.path.join('../../../../tracklib'))
if module_path not in sys.path:
sys.path.append(module_path)
# Alias pour tracklib
import tracklib as tkl
# Ajout dans la variable PATH du système du chemin où est installée la librairie footprint2graph
module_path = os.path.abspath(os.path.join('../../..'))
if module_path not in sys.path:
sys.path.append(module_path)
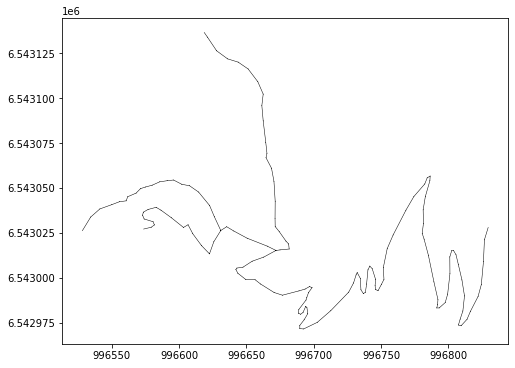
Import des données : réseau puis traces simulées#
[2]:
# WKT;link_id;source;target;direction;wkt_source;wkt_target
fmt = tkl.NetworkFormat({
"pos_edge_id": 1,
"pos_source": 2,
"pos_target": 3,
"pos_wkt": 0,
"srid": "ENU",
"separator": ";",
"header": 1})
netpath = os.path.abspath(os.path.join('../../../data/network2.csv'))
network = tkl.NetworkReader.readFromFile(netpath, fmt, verbose=False)
plt.figure(figsize=(8, 6))
network.plot('k-', '', 'g-', 'r-', 0.5, plt)
print ('Number of edges=', len(network.EDGES))
print ('Number of nodes=', len(network.NODES))
print ('')
Number of edges= 7
Number of nodes= 8
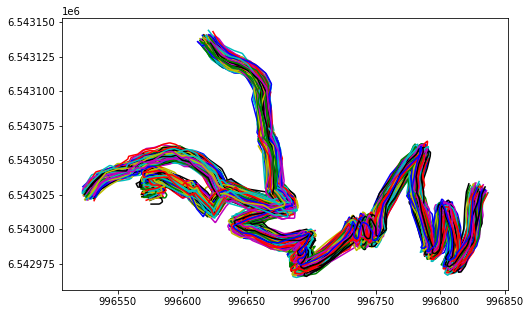
[3]:
tkl.stochastics.seed(333)
#
noiser = tkl.NoiseProcess(amps=2.5, kernels=tkl.ExponentialKernel(80))
# generate simulated trajectories from the network
collection = tkl.generateTracksOnNetwork(network, N=1000, p_round_trip=0.05, p_cplx_trip=0.10, resolution=1, noiser=noiser)
plt.figure(figsize=(8, 5))
collection.plot(append=plt)
100% (1000 of 1000) |####################| Elapsed Time: 0:00:18 Time: 0:00:180001
------------------------------------------------------------
877 (87.7 %) tracks generated on network
------------------------------------------------------------
Initialisation des paramètres#
L’initialisation des paramètres passe par la création du fichier de configuration.
Lire la doc : pour en savoir plus.
Création du fichier YAML#
Créez un fichier de configuration et enregistrez-le sur le disque dur par exemple : onfig_zone1.yml
Le code ci-dessous permet de vous montrer un exemple qui sera appliqué sur le jeu de données ci-dessus et servira donc dans le pipeline.
output:
RESULT_PATH: "aaa"
graph_construction:
NUM_ITERATIONS: 1
NB_OBS_MIN: 10
DIST_MAX_2OBS: 50
RESAMPLE_SIZE_GRID: 1
RESAMPLE_SIZE_FUSION: 5
G1_SIZE: 2
G2_SIZE: 30
iterations:
- SEUIL_DENSITE: 25
SEUIL_SURFACE: 1000
CUT_FACTOR: 5
INTERP_DIST: 5
CLEAN_DIST: 0
CURVE_HEIGHT: 25
CURVE_WAVE_LENGTH: 5
SEARCH: 50
BUFFER: 20
La section output définit le chemin pour toutes les sorties données intermédiaires et données finales. Il est très important. Il prend l’allure d’un chemin d’un répertoire comme dans l’exemple ci-dessous:
output:
RESULT_PATH: /home/glagaffe/footprint2graph/results/bauges2024/
Le répertoire de sortie est automatiquement nettoyé au démarrage du pipeline : tous les fichiers et sous-répertoires qu’il contient sont supprimés. Les répertoires et fichiers nécessaires sont ensuite recréés progressivement au cours de l’exécution.
Chargement du fichier de configuration pour lancer le pipeline#
[4]:
from footprint2graph import read_config
config_path = r'/home/md_vandamme/7_LIB/footprint2graph/data/config_zone1.yml'
config = read_config(config_path)
RESPATH = config["output"]["RESULT_PATH"]
### Préparer les données
Comme indiqué dans la doc xxx il faut ….
[5]:
# add TID attributes
for idx, track in enumerate(collection):
track.createAnalyticalFeature('TID', idx+1)
Lancement du pipeline#
[6]:
from footprint2graph import run_iteration
iteration_index = 1
run_iteration(iteration_index, config, collection)
-----------------------------------------------------------------
-----------------------------------------------------------------
ITERATION 1
-----------------------------------------------------------------
-----------------------------------------------------------------
Starting segmentation and resampling...
Starting segmentation ...
500 / 877
Number of tracks after segmentation: 877
Finished saving segmented tracks.
Starting resampling ...
Number of tracks to resample: 877
Number of tracks after resampling: 877
Number of tracks after resampling: 877
Finished saving resampled tracks.
Stage 1 finished: segmentation and resampling.
Starting rasterization and vectorization (iteration 1)
Loading tracks from : resample_grid
Number of tracks to load: 877
Building high-resolution geometry density grid G1 : 2 m ...
Building low-resolution contextual density grid G2 : 30 m ...
Assigning track points to the G1 and G2 grids
500 / 877
Computing G1 ...
Computing G2 ...
Number of neighboring cells to consider: 7
Building contrast grid : 2 m
Execution time (seconds): 7.388938665390015
Finished heatmap computation.
Starting morphological closing image ...
100% (291 of 291) |######################| Elapsed Time: 0:00:00 Time: 0:00:00
100% (287 of 287) |######################| Elapsed Time: 0:00:00 Time: 0:00:00
100% (1417 of 1417) |####################| Elapsed Time: 0:00:00 Time: 0:00:00
Execution time (seconds): 0.24269676208496094
Finished morphological opening.
Vectorizing cleaned image ...
Extracting road surface vector features ...
Number of polygonize features: 3
Number of polygonize features copied: 2
Execution time (seconds): 0.024195194244384766
Vectorization completed.
Smoothing polygon to remove stair-step artifacts ...
Execution time (seconds): 0.08256912231445312
Road surface smoothing completed.
Starting centerline computation ...
0% (0 of 16) | | Elapsed Time: 0:00:00 ETA: --:--:--
Execution time (seconds): 0.17237114906311035
Centerline computed.
Stage 2 completed: rasterization and vectorization.
Starting topology creation for the network
Number of edges in the skeleton: 279
Finished loaded skeleton.
/home/md_vandamme/7_LIB/footprint2graph/test/result1/network/tmp_in.csv not exists
/home/md_vandamme/7_LIB/footprint2graph/test/result1/network/tmp_out.csv not exists
Finished removing hooked parts of the skeleton.
100% (16 of 16) |########################| Elapsed Time: 0:00:00 Time: 0:00:000:00
100% (16 of 16) |########################| Elapsed Time: 0:00:00 Time: 0:00:00
Finished simplification of the skeleton.
Building [100 x 53] spatial index...
Number of edges in the skeleton (after snapping): 16
Edge count difference after snapping : 0
Number of edges in the simplified skeleton: 15
Number of nodes: 16
Shortest edges limit : 50
Number of edges in the skeleton (after removing the shortest edges): 0
Conflation cannot be performed for node 11 ; the three incident edges are too long: 33 167 284
Conflation cannot be performed for node 0 ; the three incident edges are too long: 33 64 122
Edge count after conflation: 5
Stage 3 completed: adding topology to the skeleton.
Starting map-matching, aggregation, and conflation of GNSS trajectories.
Loading network (1) ...
Number of edges = 5
Number of nodes = 6
Total segment length of the network = 765.9881721625045
Loading collection of tracks ...
100% (6 of 6) |##########################| Elapsed Time: 0:00:00 Time: 0:00:00
Number of tracks: 877
Execution time (seconds): 0.6371288299560547
Starting map-matching ...
Index spatial : [100 x 53] spatial index centered on [996680.2867880978; 6543054.718881102]
Map-matching preparation...
Parameter search_radius: 50
Map-matching ended.
Execution time (seconds): 14.555225610733032
Prepare map-matching results for candidate segment generation
Number of map-matched points = 49111 (89.82 %)
Map-matching results restructuring completed.
Map-matching results exported.
Starting construction of candidate trajectory segments for each topology edge ...
265 candidates for edge 15
571 candidates for edge 12
264 candidates for edge 16
189 candidates for edge 17
235 candidates for edge 21
Number of processed edges: 5
Minimum number of candidate tracks per edge: 189
Maximum number of candidate traces per edge: 571
Average number of candidate tracks per edge: 305
Segment construction completed.
Execution time (seconds): 4.695148944854736
Starting track segment aggregation for all network edges ...
Number of candidate tracks / number of sampled tracks 265 / 30
Number of candidate tracks / number of sampled tracks 264 / 30
Number of candidate tracks / number of sampled tracks 189 / 30
Number of candidate tracks / number of sampled tracks 235 / 30
Number of aggregations: 5
Number of aggregations with 30 traces: 4
Number of aggregations with fewer than 30 traces: 0
Minimum number of traces in aggregation: 189
Average number of traces in aggregation: 191
Aggregation process finished.
Execution time (seconds): 2.3608899116516113
Starting conflation ...
Conflation process finished.
Execution time (seconds): 0.008021354675292969
Stage 4 completed: map-matching, aggregation, and conflation.
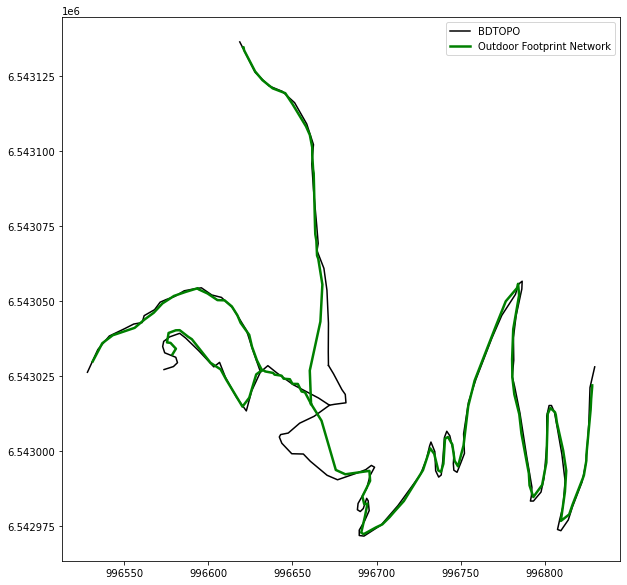
Résultats#
On va afficher le réseau de mobilité créé. Pour plus de détails sur les étapes intermédiaires, le prochaine notebook expliquera les différentes fonctionnalités.
[7]:
from footprint2graph.util.PlotRes import plotAggregation, plotConflation
plt.figure(figsize=(10, 10))
ax = plt.subplot2grid((1, 1), (0, 0))
for edge in network:
track = edge.geom
ax.plot(track.getX(), track.getY(), 'k-', markersize=8, label='BDTOPO')
plotConflation(RESPATH, ax, size=2.5, label='Outdoor Footprint Network')
# Supprime les doublons dans la légende
handles, labels = ax.get_legend_handles_labels()
by_label = dict(zip(labels, handles))
ax.legend(by_label.values(), by_label.keys())
[7]:
<matplotlib.legend.Legend at 0x7cae42ead270>